本帖最后由 liuqiyong 于 2023-9-11 09:57 编辑
光学镜头与光学设计、高端精密制造紧密相关,在机器视觉方面有着举足轻重的地位。光学镜头是光学成像系统中的必备组件,直接影响到成像质量的好坏,影响算法的实现和效果,其质量的好坏尤为重要。 所以,镜头组装完成,都需要测试解像力及成像质量的好坏,不同的光学系统应用不同的镜头,所以也有不同的解像检测方式和方法。今天为大家介绍光学镜头两种常见质量问题的评价指标及测试方法。 一、畸变 畸变(distortion)也称为失真,是由于光阑球差的影响,不同视场的主光线通过光学系统后与高斯像面的交点高度不等于理想像高,两者之差就是畸变。因此畸变只改变轴外物点在理想面上的成像位置,使像的形状产生失真,但不影响像的清晰度。 畸变有正负之分。如下图a所示,一垂直于光轴的正方形平面物体,当镜头具有正畸变时,如下图b所示,称为枕型畸变;当镜头具有负畸变时,如下图c所示,称为桶型畸变。 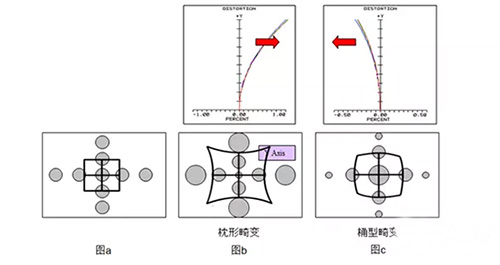
畸变通常有两种计算方法:光学畸变(Optical distortion)和TV失真(TV distortion)。如下图所示,其计算方法为: 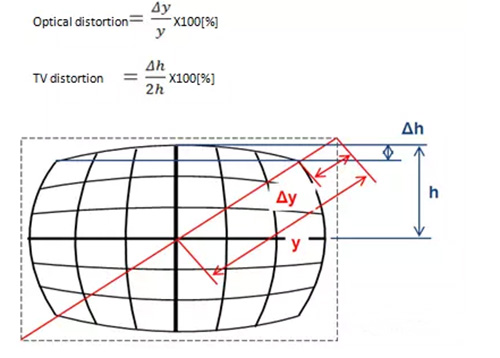
在机器视觉工程师非常关心的一个问题是:如何利用镜头畸变的参数来计算测量误差?在此举例说明。 若相机芯片为2/3’(对角线为11mm,像元尺寸为3.45um),某镜头光学畸变率为dist=0.05%, 有y=5.5mm,则Δy=dist*y/100=0.05%x5.5mm/100=2.75um。故此畸变导致像发生了2.75um的偏移,小于一个像素。 二、分辨率 分辨率定义为:能被分辨开来的两个物点(或像点)之间的最小距离,称为镜头的物方分辨率,记为Resolution(物)(或像方分辨率,记为Resolution(像))。单位为um。 Resolution(物) = 0.61 x Wavelength/NA=1.22 x Wavelength x Fno。 Resolution(像) = 镜头放大倍率x Resolution(物) 解像力定义为:1mm内的黑白线对数,记为Resolving power。单位为line/mm或lp/mm。 Resolving power = 1/ Resolution(像) 提到分辨率,大部分工程师会想到相机分辨率,而忽略镜头的分辨率对最终成像效果也起到关键作用。事实上,只有镜头分辨率和相机分辨率匹配,才能得到最佳成像效果。下图直观的表示出镜头和相机匹配对成像效果的影响。 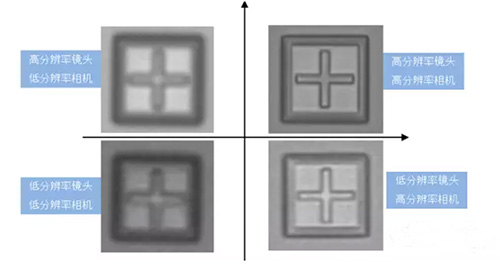
那么镜头分辨率跟相机分辨率如何才能匹配呢? 我们知道,物体是成像在相机芯片上的,物方的两个点,经过镜头系统成像在相机芯片上的最小距离,只有如下图c所示时才能被分辨开来。若物方两点成像在芯片上的距离如下图a,下图b所示时,这两点都不能被分辨开来。 因此镜头的像方分辨率=2x像元尺寸时,说明此时镜头分辨率与相机完全匹配。如相机像元尺寸为5um,镜头放大倍率为0.5倍。则有Resolution(物)=2x5um/0.5=20um时,镜头与相机完全匹配。若Resolution(物)<20um,>20um,说明此时相机过好,镜头分辨率将成为系统限制。 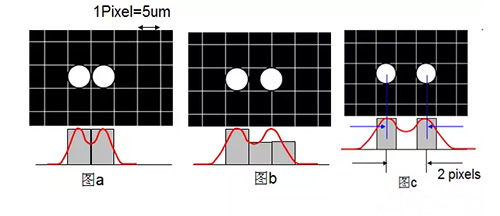
另外,镜头的物方分辨率与产品的精度也常被工程师混淆。 精度指的是测量值与真实值之间的差异。如产品真实值为1.0mm,要求精度为±5um,则说明只要测量出的值在0.995mm~1.005mm间即为合格品。 在机器视觉中通常根据客户的FOV和精度要求算出相机的分辨率(如200万像素),相机一旦选定,则相机的像元尺寸(如4.65um)也确定了。选镜头时即可根据上面的方法来选择分辨率匹配此相机的镜头,从而保证系统的精度要求。 而如果客户描述的是需要观察到物方大小为5um的目标,则要求镜头的物方分辨率必须<10um。
|  /1
/1 



 发表于 2023-9-11 09:51
发表于 2023-9-11 09:51